Ansys SPEOS在激光雷达领域的仿真应用
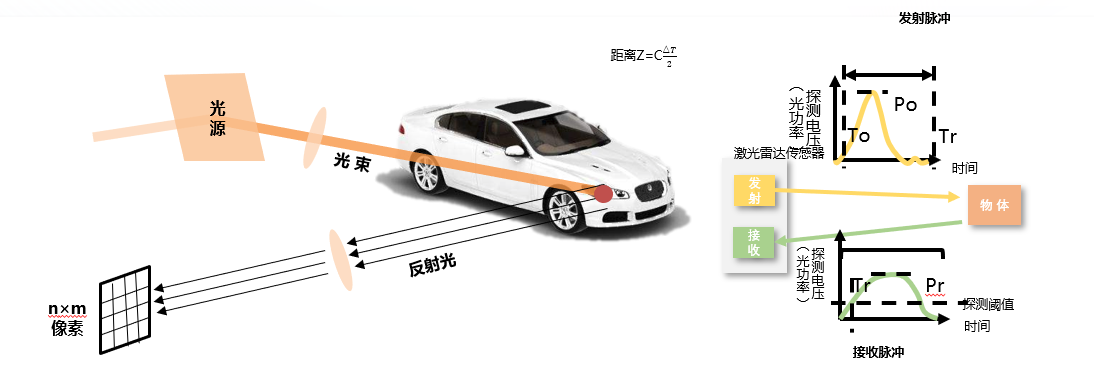
静态LiDAR发射一个单一的大光束,然后收集反射的光在一个传感器。Ansys SPEOS在原始飞行时间文件中记录每个像素的数据。
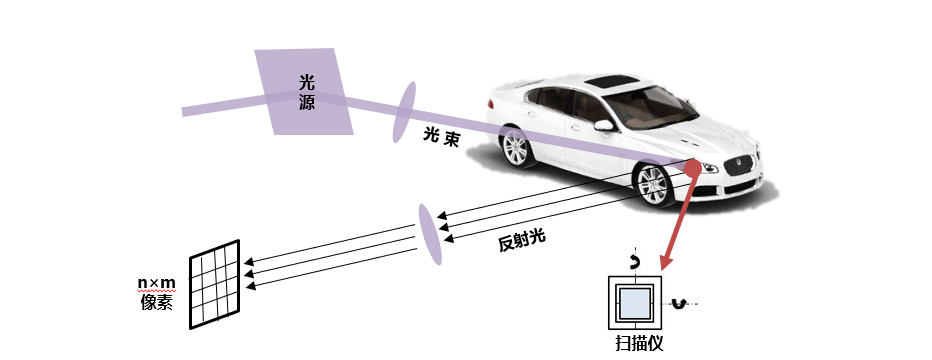
扫描LiDAR通常使用扫描镜连续发射不同方向的狭窄光束,然后收集反射光到一个像素的传感器。Ansys SPEOS记录每个光束的原始飞行时间文件的数据。
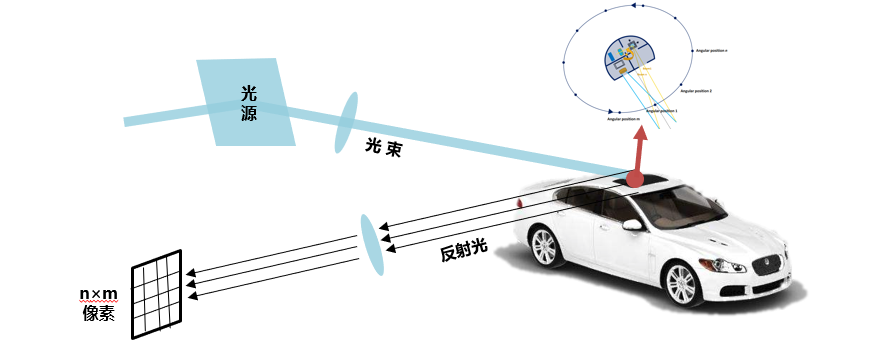
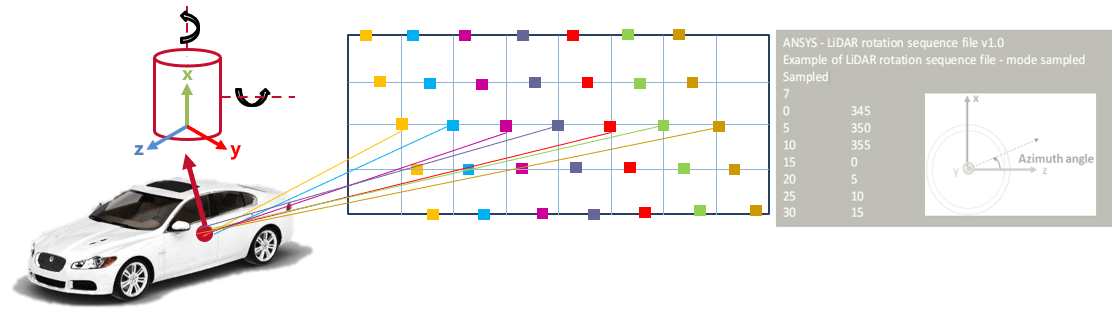
Arotating LiDAR是一个扫描LiDAR,连续发射狭窄的光束,在360度的位置角度控制瞄准方向。Ansys SPEOS记录数据为每个组合的光束和角度位置在原始飞行时间文件。
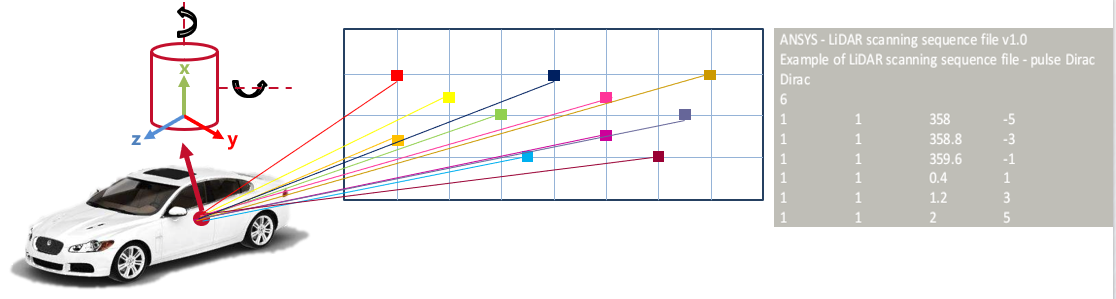
发射序列:是指以不同方向发射的光脉冲序列,以覆盖激光雷达视野或空间中的特定图案的序列。每个火灾方向相对由激光雷达系统的轴系统定义。
扫描激光雷达是一个单个脉冲的序列:
-
设置单个脉冲的模式
旋转激光雷达是单个脉冲或脉冲风扇的旋转序列
-
扫描序列文件将设置为模式
- 旋转序列文件设置旋转顺序
拍摄时间脉冲能量方位角仰角扫描序列文件设置单个脉冲的模式。其中:
‐[拍摄时间]在μs中表达脉冲能量,用焦耳J表示
‐J[方位角]以度表示
‐[方位角]用度表示,Δα∈[0,360°
‐[倾斜角度]以度表示:Δϕ∈[−90°,90°]
‐[拍摄时间]在μs中表达脉冲能量,用焦耳J表示
‐J[方位角]以度表示
‐[方位角]用度表示,Δα∈[0,360°
‐[倾斜角度]以度表示:Δϕ∈[−90°,90°]
‐需要定义样品数
‐J[方位角]以度表示
‐[方位角]用度表示,Δα∈[0,360°]
‐J[方位角]以度表示
‐[方位角]用度表示,Δα∈[0,360°]
几何旋转激光雷达(GR LiDAR)
解决方案致力于帮助工程进程
解决方案致力于帮助工程进程
GR LiDAR传感器在以下方面很有用:
-
测试供应商的能力
-
验证视野,同时将旋转激光雷达集成到产品中
-
管理万一的情况
我们提供了一系列的工具:
-
视野可视化 - 获得你的系统将覆盖的范围(射线/影响)
-
点云 - 获得影响点的坐标值